Принцип импульсного регулирования
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет следующий вид. Источника постоянного напряжения Uип ключом K подсоединяется к нагрузке Н. Ключ К переключается с определенной частотой и остается во включенном состоянии определенную длительность времени. С целью упрощения схемы я на ней не изображаю другие обязательные элементы. В данном контексте нас интересует только работа ключа К.

Чтобы понять принцип ШИМ воспользуемся следующим графиком. Разобьем ось времени на равные промежутки, называемые периодом T. Теперь, например половину периода мы будем замыкать ключ K. Когда ключ замкнут, к нагрузке Н подается напряжение от источника питания Uип. Вторую часть полупериода ключа находится в закрытом состоянии. А потребитель останется без питания.

Время, в течение которого ключ замкнут, называется временем импульса tи. А время длительности разомкнутого ключа называют временем паузы tп. Если измерить напряжение на нагрузке, то оно будет равно половине Uип.
Среднее значение напряжения на нагрузке можно выразить следующей зависимостью:
Uср.н = Uип tи/T.
Отношение времени импульса tи к периоду T называют коэффициентом заполнения D
А величина, обратная ему называется скважностью:. S = 1/D = T/tи
S = 1/D = T/tи.
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма сигнала называется меандр. Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср.н от 0 до Uип:
Uср.н = Uип∙D.
А соответственно регулировать и величину подводимой мощности:
Pср.н = Pип∙D.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Два полюса лучше одного?
Давайте посмотрим на результаты работы двухполюсного фильтра для тех же двух частот среза. Следующая схема представляет собой RLC фильтр с критическим затуханием с fср ≈ 50 кГц:
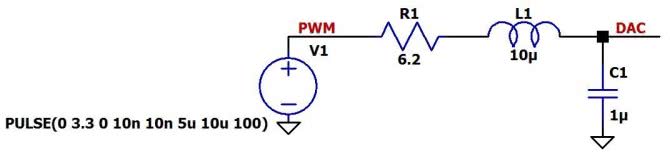
Рисунок 12 – Схема моделирования в LTspice: генератор ШИМ сигнала и RLC фильтр нижних частот с частотой среза 50 кГц

Рисунок 13 – Пульсации напряжения, полученного на выходе RLC фильтра нижних частот с частотой среза 50 кГц
Как и ожидалось, это значительное улучшение по сравнению с однополюсным фильтром 50 кГц; размах пульсаций уменьшился с примерно 2,15 В до менее чем 900 мВ.
Вот схема для RLC фильтра с критическим затуханием с fср ≈ 1 кГц:

Рисунок 14 – Схема моделирования в LTspice: генератор ШИМ сигнала и RLC фильтр нижних частот с частотой среза 1 кГц
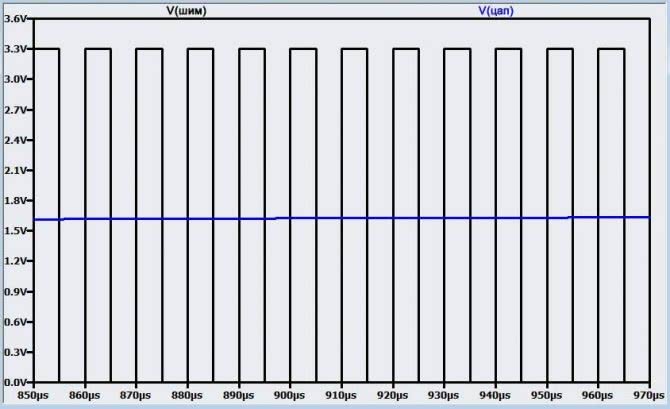
Рисунок 15 – Пульсации напряжения, полученного на выходе RLC фильтра нижних частот с частотой среза 1 кГц
Здесь мы почти устранили пульсации; если бы вы увеличили масштаб, то обнаружили бы, что размах пульсаций составляет всего около 500 мкВ. Но теперь у нас снова есть проблема со временем установления (вспомните компромисс № 1):

Рисунок 16 – Время установления напряжения на выходе RLC фильтра нижних частот с частотой среза 1 кГц
В этот момент вы можете подумать о том, как можно улучшить этот фильтр для достижения быстрого отклика в сочетании с низкими пульсациями. Возможно, вы заметили, что для предыдущей схемы требовалось 2,2 миллигенри – это огромная индуктивность. А что насчёт активного фильтра? Фильтр Саллена-Ки? Может быть, фильтр Саллена-Ки после RC фильтра? Подождите, почему бы просто не использовать фильтр с переключаемым конденсатором? Четыре полюса, или даже пять или семь… Это подводит нас ко второму компромиссу:
Компромисс № 2: Фильтры высшего порядка улучшают производительность, но они также увеличивают стоимость и сложность. Вместо того, чтобы тратить время и деньги на внедрение причудливого фильтра для посредственного ЦАП на базе ШИМ, мы просто должны использовать внешний ЦАП! На мой взгляд, вы не должны выходить за пределы одного полюса. Внешние ЦАП (и микроконтроллеры со встроенными ЦАП) настолько широко доступны, что ЦАП на базе ШИМ теряет свою привлекательность, если вы не можете удовлетворить свои требования к производительности с помощью RC фильтра.
ШИМ, резистор, конденсатор
Абсолютный минимум здесь – это резистор, конденсатор и что-то вроде широтно-импульсной модуляции. У вас наверняка не будет недостатка в возможностях ШИМ, если вы используете FPGA или CPLD. Что касается процессоров, я думаю, что каждый микроконтроллер, с которым я когда-либо работал, включал в себя аппаратный модуль ШИМ, но я предполагаю, что должны быть некоторые модели, у которых его нет. Итак, это первое, что нужно проверить – если у вашего микроконтроллера нет ШИМ модуля, вам не повезло (если только вы не захотите программно реализовать ШИМ, но если серьезно, в этом случае проще использовать внешний ЦАП). Далее вам нужен способ фильтрации нижних частот ШИМ сигнала. Если вы не возражаете против некоторых пульсаций на выходе, вам может подойти простейший однополюсный RC-фильтр, поэтому, если всё, что вы можете вписать в вашу плату или в бюджет, это резистор и конденсатор, ЦАП на основе широтно-импульсной модуляции по-прежнему является жизнеспособным вариантом. Тем не менее, чем лучше фильтр, тем лучше ЦАП, и, возможно, стоит добавить катушку индуктивности или операционный усилитель, чтобы получить два полюса вместо одного.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.

- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.

- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название «мягкий старт». При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Популярные бренды
В бюджетных моделях проценты указываются приблизительно. Это относится к моделям бренда EPSolar. Производители от Morningstar совсем отказались от SOC и выдают информацию пользователю о напряжении АКБ в вольтах. Более достоверными считаются показания процентов у таких торговых марок:
- Steca PR1010-3030;
- Tarom;
- Power Tarom.
Китайские производители EPSolar являются наиболее востребованными на рынке данной электроники. Их продукция является оптимальной по соотношению стоимости и качеству, при этом в арсенале имеются модели, впитавшие максимальное количество функционала. Высокое качество комплектующих и сборки выгодно отличает бренд от конкурентов типа Steca Solar. Имеются модели с таймерами для выключения/включения разных ночников.

EPsolar LS2024B PWM Контроллер заряда 20А, 12/24В
Более дорогим является немецкий бренд Steca. Европейское качество привязано к стоимости валюты, поэтому не все могут выбрать такие модели.

Steca Solar PR
Управление по току (Current Mode)
Данный метод устраняет недостаток режима управления по напряжению. В этом методе Контроллер получает вторую петлю обратной связи. Внутренний быстрый контур служит для контроля тока силового ключа (индуктивности) на каждом цикле его включения. При подаче сигнала на открытие силового ключа, ток через индуктивность, а значит и через силовой ключ, начинает линейно расти. При достижении порога силовой ключ размыкается, начинается отдача энергии индуктивности через диод. По времени или по детектированию нулевого тока в индуктивности (в режиме непрерывного тока или критической проводимости, CCrM) цикл повторяется.
Так как силовой ключ размыкается при достижении пикового тока, то обеспечивается постоянство накопленной энергии в индуктивности вне зависимости от входного напряжения (изменение входного напряжения влияет на скорость заряда). Второй контур петли регулирования контролирует выходное напряжение.
Управление по току с гистерезисным управлением: аналогично методу управления по напряжению – осуществляется Вкл/Выкл ШИМ управления силового ключа в зависимости от напряжения на выходе.
Рис.11а. ШИМ контроллер с управлением по току с гистерезисным управлением. Isence – контроль пика тока Is через индуктивность, Vout – проверка выходного напряжения, блокирование управляющего ШИМ при превышении выходного напряжения. Вариант с фиксированным выходным напряжением и с регулировкой выходного напряжения.
Рис. 11б. ШИМ контроллер и вариант выходной топологии для повышающего преобразователя с контролем пикового тока.
Зачем нужен программный ШИМ?
Затем, что на самом AVR (Atmega) каналов шим 1-2, что часто не хватает для того, что надо.
Пусть у нас есть 3 (три) светодиода и яркостью каждого их них мы хотим управлять индивидуально. Встроенных ШИМ каналов таймера не хватит. И, вообще, может мы еще какой-то особый контроль хотим осуществлять над каждым из них. Поэтому сажаем их на обычные ноги (в примере PORTC ноги 3,4,5) и управляем программно.
Схема:
Дополнительная информация по поводу подключения:
http://www.radiokot.ru/start/mcu_fpga/avr/05/ и в даташите к контроллеру.
Расчет резистора для светодиода:
Питание: 5В. Падение напряжения на светодиоде можно считать 1.5В. Тока на светодиоде должен быть не более 20мА (некоторые поспорят, что надо 15мА, но мне нравится поярче).
По закону Ома: I=U/R, R=U/I=(5-1.5)/0.02=175 Ом. Я поставил резисторы R1,R2 и R2 — 220 Ом.
Управление вентилятором
Простейший метод управления вентилятором — отсутствие какого-либо управления вообще. Вентилятор просто запускается на максимальной скорости и работает все время. Преимущества такого управления — гарантированное стабильное охлаждение и очень простые внешние цепи. Недостатки — уменьшение срока службы вентилятора, максимальное энергопотребление, даже когда охлаждение не требуется, и непрерывный шум.
Следующий простейший метод управления — термостатический или on/off. В этом случае вентилятор включается только тогда, когда требуется охлаждение. Условие включения вентилятора устанавливает пользователь, обычно это какое-то пороговое значение температуры.
Подходящий датчик для on/off управления — это ADM1032. Он имеет выход THERM, который управляется внутренним компаратором. В нормальном состоянии на этом выходе высокий логический уровень, а при превышении порогового температурного значения он переключается на низкий. На рисунке 3 показан пример цепи с использованием ADM1032.
Рисунок 3. Пример on/off управления
Недостаток on/off контроля — это его ограниченность. При включении вентилятора, он запускается на максимальной скорости вращения и создает шум. При выключении он полностью останавливается и шум тоже прекращается. Это очень заметно на слух, поэтому с точки зрения комфорта такой способ управления далеко не оптимальный.
При линейном управлении скорость вращения вентилятора изменяется за счет изменения напряжения питания. Для получения низких оборотов напряжение уменьшается, для получения высоких увеличивается. Конечно, есть определенные границы изменения напряжения питания.
Рассмотрим, например, вентилятор на 12 вольт. Для запуска ему требуется не меньше 7 В и при этом напряжении он, вероятно, будет вращаться с половинной скоростью от своего максимального значения. Когда вентилятор запущен, для поддержания вращения требуется уже меньшее напряжение. Чтобы замедлить вентилятор, мы можем понижать напряжение питание, но до определенного предела, допустим, до 4-х вольт, после чего вентилятор остановится. Эти значения будут отличаться в зависимости от производителя, модели вентилятора и конкретного экземпляра.
5-и вольтовые вентиляторы позволяют регулировать скорость вращения в еще меньшем диапазоне, поскольку их стартовое напряжение близко к 5 В. Это принципиальный недостаток данного метода.
Линейное управление вентилятором можно реализовать на микросхеме ADM1028. Она имеет управляющий аналоговый выход, интерфейс для подключения диодного температурного датчика, который обычно используется в процессорах и ПЛИС, и работает от напряжения 3 — 5.5 В. На рисунке 4 показан пример схемы для реализации линейного управления. Микросхема ADM1028 подключается ко входу DAC.
Рисунок 4. Схема для реализации линейного управления 12-и вольтового вентилятора
Линейный метод управления тише, чем предыдущие. Однако, как вы могли заметить, он обеспечивает маленький диапазон регулировки скорости вращения вентилятора. 12-и вольтовые вентиляторы при напряжении питания от 7 до 12 В, позволяют устанавливать скорость вращения от 1/2 от максимума до максимальной. 5-и вольтовые вентиляторы при запуске от 3,5 — 4 В, вращаются практически с максимальной скоростью и диапазон регулирования у них еще меньше. Кроме того, линейный метод регулирования не оптимален с точки зрения энергопотребления, потому что снижение напряжения питания вентилятора выполняется за счет рассеяния мощности на транзисторе (смотри рисунок 4). И последний недостаток — относительная дороговизна схемы управления.
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы. ШИМ на irf4905, питание5 v

ШИМ на irf4905, питание5 v
Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.
Если нужно управлять, к примеру,12 -ти вольтовым устройством, то схема немного усложнится. Добавится так называемое «плечо раскачки» или драйвер полевого транзистора. По классике он собирается на двух, а иногда и на трёх транзисторах, но мы есть вариант немного проще, который работает при невысоких частотах:

Ардуино, управление ШИМ по плюсовому проводу IRF4905
ШИМ (PWM) — генератор
Широтно-Импульсная Модуляция (Pulse Width Modulation) используется весьма широко, в том числе для управления всякими автомобильными приводами, которые должны двигаться плавно
* ВНИМАНИЕ! под катом видны грязные руки на фото и видео! Суть состоит в том, что на некий например электромагнит подается не постоянный ток, а сигнал с некоторой частотой, при этом для плавного управления меняется соотношение высокого и низкого уровня за период. То есть если у нас 30% периода на привод будет подаваться питание, а 70% — нет, то он откроется меньше, чем если бы на него подавалось питание 70% времени, а 30% он отдыхал
За счет инерции привод не успевает полностью открыться либо закрыться, соответственно работает плавно. Данный принцип, повторюсь, используется весьма широко, везде где нужно обеспечить плавное регулирование. Два примера применения я покажу ниже.
Итак, данный девайс имеет размеры 79х43х24 (ШхВхГ), установочное отверстие 72х39, плюс выборки по бокам для защелок.
Клеммники не особо высокого качества, что и неудивительно; подписаны. 4 контакта: + и — питания, — и сигнал ШИМ. Минусы объединены. По питанию стоит диод.

Внутренний мир прост и незатейлив:
Тут у нас драйвер дисплея HT1621, микроконтроллер Nuvotek N76E003AT20, стабилизатор напряжения M5333B и выходной транзистор с маркировкой 1АМ — надо полагать это 3904.
На передней панели ЖКИ с на удивление неплохими углами обзора и 4 кнопки: частота+- и коэффициент заполнения +-
Посмотрим как оно работает.
Вот на самой низкой частоте для понимания принципов ШИМ-регулировки, кто не знает:

Индикация частоты следующим образом: герцы — без точки, килогерцы — с точкой, больше сотни килогерц — с двумя точками.Максимальная частота — 150кГц. Инкремент по 1% ШИМ и по единице младшего разряда, то есть 1Гц, либо 0.01кГц, либо 0.1кГц, либо 1кГц, либо 10кГц, в зависимости от частоты.
И сразу осциллки на высоких частотах, 20кГц, 50кГц, 100кГц, 150кГц.

Как видим сигнал не шибко красивый, но тут не может быль ничего другого, ибо выходная цепь — транзистор с парой резисторов.
А теперь осциллки на промежуточных частотах, если кому это интересно:

Ну вот такой, в общем, приборчик. Понравился, если честно. прям вот за 5 баксов, за которые я его взял — очень хорошо.
Ну а теперь — диайвай немножко рукоделия. Я придумал два применения данному генератору: проверка всеразличных соленоидов, например Регуляторов Холостого Хода, и промывка форсунок. При промывке форсунок в ультразвуковой ванне мне нравится загонять их в режим самопрокачки. Но аналоговый генератор не обладает достаточной стабильностью (а может дело и в форсунках — уходят характеристики при прогреве), так что я решил применить данный цифровой, в надежде на более высокую стабильность. Я в любом случае собирался делать еще один генератор, так что решил не заморачиваться и купил этот, сразу как только увидел.
Но у нас тут явно недостаточная мощность для управления форсунками, значит придётся ставить выходные ключи. Типа такого:
Возможно, придётся заменить выходной транзистор в самом устройстве, ну и надо подобрать силовые транзисторы получше, возможно мои любимые IRFZ44 — жаль, закончились. Собственно, на данном этапе устройство собрано на 50% — я впаял два первых попавшихся полевика, кажется IRF630 — ну потому что больше одинаковых нету у меня
Далее нам понадобится корпус. Примерно такой:

Ну и 3Д-принтер для его изготовления. Плату делал по фоторезистивной технологии описанной в прошлом обзоре.
Ну и сразу результат.
Внутренности:

И наружа:
В боксе холодно, так что детали к сожалению не сильно хорошо прилипают к столу, так что качество корпуса получилось не ахти. Меня-то устроит, но в целом чувствуется недосказанность какая-то, поэтому файлы моделей не выкладываю, благо рисуется это всё быстро и просто.
Выключатели: верхний подает питание на всю схему, нижний отключает выходной каскад.
А теперь — примеры работы. проверка РХХ
И режим самопрокачки форсунки
Подытоживая: отличный генератор. Повторять конструкцию возможно и не стОит в том виде в котором она сейчас показана в обзоре, но в целом что-то подобное — однозначно маст хэв в каждом сервисе. Да и не только в сервисе. Так что берите идею, и ваяйте своё.
1Общие сведенияо широтно-импульсной модуляции
Цифровые выводы Arduino могут выдавать только два значения: логический 0 (LOW, низкий уровень) и логическую 1 (HIGH, высокий). На то они и цифровые. Но есть у Ардуино «особые» выводы, которые обозначаются PWM. Их иногда обозначают волнистой чертой «~» или обводят кружочками или ещё как-то выделяют среди прочих. PWM расшифровывается как Pulse-width modulation или широтно-импульсная модуляция, ШИМ.
Обозначение выходов с ШИМ на Arduino Leonardo
Широтно-импульсно модулированный сигнал – это импульсный сигнал постоянной частоты, но переменной скважности (соотношение длительности импульса и периода его следования). Из-за того, что большинство физических процессов в природе имеют инерцию, то резкие перепады напряжения от 1 к 0 будут сглаживаться, принимая некоторое среднее значение
С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
Если скважность равняется 100%, то всё время на цифровом выходе Arduino будет напряжение логическая «1» или 5 вольт. Если задать скважность 50%, то половину времени на выходе будет логическая «1», а половину – логический «0», и среднее напряжение будет равняться 2,5 вольтам
Ну и так далее.
Принцип работы широтно-импульсной модуляции (ШИМ)
В программе скважность задаётся не в процентах, а числом от 0 до 255. Например, команда analogWrite(10, 64) скажет микроконтроллеру подать на цифровой PWM выход №10 сигнал со скважностью 25%
Выводы Arduino с функцией широтно-импульсной модуляции работают на частоте около 500 Гц. Значит, период следования импульсов – около 2 миллисекунд, что и отмеряют зелёные вертикальные штрихи на рисунке.
Получается, что мы можем сымитировать аналоговый сигнал на цифровом выходе! Интересно, правда?!
Как же мы можем использовать ШИМ? Применений масса! Например, управлять яркостью светодиода, скоростью вращения двигателя, током транзистора, звуком из пьезоизлучателя и т.д.…
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Похожие записи:
 Активное, емкостное и индуктивное сопротивление. закон ома для цепей переменного тока
Активное, емкостное и индуктивное сопротивление. закон ома для цепей переменного тока
 Ретро проводка в современном доме
Ретро проводка в современном доме
 Где используется фидерный кабель
Где используется фидерный кабель
 Маркировка smd компонентов: кодовые обозначения
Маркировка smd компонентов: кодовые обозначения
 Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
 Как подключить усилитель в машине
Как подключить усилитель в машине