Потери энергии в мостовой интегральной схеме
Внутренняя схема управления в микросхеме L298N обеспечивает активное выключение устройств выхода, когда они переключаются в ответ на четыре фазовых входных сигнала. Однако при переключении в ответ на сигналы включения в устройствах выхода снимается все базовое возбуждение, а в схеме нет активного элемента, который устранил бы накопленный заряд из базы. В процессе прерывания сигнала включения время спада тока в силовых устройствах дольше, чем при использовании прерывания фаз, поэтому при переключении потери также будут большими.
В ответ на входной сигнал или сигнал включения внутренняя логическая схема управления в микросхемах L6202 и L6203 действует одинаково, поэтому при использовании прерывания сигнала включения или фазового прерывания потери равны. Их можно уменьшить, применив прерывание одной фазы. Тем не менее, потери, обусловленные падениями напряжения на концах устройства, не одинаковы. Во время прерывания сигнала включения все четыре выходные ДМОП-устройства выключены, ток рециркулирует от корпуса к диодам утечки выходных ДМОП-транзисторов. При фазовом прерывании ДМОП-устройства включены и проводят ток в обратном направлении. Поскольку падение напряжения на концах ДМОП-устройств меньше прямого падения напряжения на диоде при токах менее 2 А, ДМОП-устройства отбирает значительный ток, и рассеяние мощности при использовании прерывания фаз принимает гораздо меньшие значения, чем при прерывании сигнала включения, что может быть видно из графиков в проспектах изделий.
Для этих устройств прерывание фаз всегда сопровождается меньшими потерями в устройстве. Чтобы определить, какие потери — переключения или насыщения — меньше для дискретных мостов, их необходимо вычислить.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |
Что такое H-мост
При проектировании станков, роботов и других автоматизированных устройств возникает необходимость управлять электродвигателем постоянного тока или же катушками шагового движка. Для того, чтобы иметь возможность управлять обмоткой двигателя и заставить его вал вращаться в разные стороны, необходимо выполнять коммутацию с переполюсовкой. Для подобной цели используется так называемый «H-мост».
Почему такое название? — потому что схема включения двигателя и переключателей для коммутации напоминает латинскую букву H. Принципы работы H-моста показан нарисунке ниже.

Рис. 1. Как работает H-мост, принцип коммутации двигателя для вращения в разные стороны.
Как видим, при помощи 4х переключателей мы можем подключать мотор к источнику питания в разной полярности, что в свою очередь заставит вращаться его вал в разные стороны. Переключатели можно заменить на реле, или же на мощные электронные ключи на транзисторах.
Важно заметить что НЕЛЬЗЯ допускать замыкания двух ключей на одной стороне H-моста, поскольку получится короткое замыкание, при проектировании схемы моста нужно заложить это правило в логику и таким образом реализовать защиту
L298N, Arduino и двигатель постоянного тока
Активный — доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
Максимально допустимый ток для одного канала платы составляет 2А. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Подключение двигателя производится к винтовым клеммным зажимам — по паре для питания каждого моторчика. Активный режим. Потенциометр кОм.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
Позволяет управлять двумя моторами постоянного тока, либо одним шаговым двигателем. Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Максимальное напряжение питания постоянным током 35 вольт. Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. Если джампер одет, то реализуется логика «пассивного» управления. После этого подключите источник питания. Активный режим.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше вот тут. Видео-демонстрация работы шагового двигателя: Заключение Надеюсь вы получили ответ на вопрос «что такое H-мост и как он работает», из экспериментов должно быть понятно как применять драйвер на микросхеме L и подключать к нему разные движки
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. LOW Выходим из редактора и сохраняем файл.
Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver
Схема драйвера с L298 – полная версия

Драйвер L298 может работать с напряжением до 46 В и токами до 2 А на канал (всего 4А) в непрерывном режиме, хотя лучше не превышать общую мощность. С двигателями мощностью более 10 Вт лучше всего установить радиатор, как показано на фотографии.
Давайте проанализируем работу электронных схем драйверов в двух версиях. Помимо микросхемы L298 в схемах использованы несколько дополнительных компонентов. Логической части L298 требуется источник питания на 5В, и поэтому использован стабилизатор напряжения 78L05, который является маломощным вариантом классического 7805. Стабилизатор 78L05 обеспечивает максимальный выходной ток до 100 мА, что более чем достаточно для наших целей.
Для того чтобы визуально отслеживать направление вращения каждого двигателя, в схеме использованы два светодиода (красный и желтый), соединенные встречно-параллельно. На схеме мы также можем видеть 8 диодов для защиты от выбросов ЭДС самоиндукции.
Для этих диодов лучшим выбором будут диоды Шоттки, особенно, в случае если мы используем драйвер для управления двигателями средней мощности или управляем частотой вращения двигателя с помощью ШИМ (широтно-импульсная модуляция). В простых же схемах — диодов типа 1N4007 будет достаточно.
Список необходимых компонентов (упрощенная версия):
- 4 резистора по 100 Ом;
- 2 резистора по 1,8 кОм;
- 1 конденсатор емкостью 100 нФ;
- 2 электролитических конденсатора на 22 мкФ;
- 8 диодов 1N4007;
- 2 желтых светодиода;
- 2 красных светодиода;
- 1 стабилизатор 78L05;
- 1 драйвер L298.
Управляющие входы обеих версий работают с логикой 5В (TTL), хотя мы можем без проблем управлять сигналами управления на 3,3В. Резисторы, с сопротивлением 100 Ом на входах, служат только для защиты и могут быть заменены перемычками из проволоки.

Ниже в таблицах истинности мы видим логику управления. У упрощенной модели есть два управляющих входа для каждого двигателя (MA и MB), в то время как в полной версии у нас еще есть вход разрешения (ENA).

С нашем случае на данные входы не нужно дополнительно подавать сигнал, поскольку к ним уже подключены подтягивающие резисторы по 4,7кОм. Для того чтобы отключить мост, нам просто необходимо снизить напряжение до 0 В.
L298N и шаговый двигатель
Для нашего примера мы используем шаговый двигатель Nema 17, у которого четыре кабеля для подключения.
 |
| шаговый двигатель |
Этот двигатель имеет 200 шагов на оборот и может работать с частотой вращения 60 об/мин. Если вы используете другой шаговый двигатель, уточните шаг его шаг и максимальную частоту вращения. Эти параметры понадобятся вам при программировании Arduino.
Еще один важный момент — определить какие именно кабели соответствуют A+, A-, B+ и B-. В нашем примере соответствующие цвета кабелей: красный, зеленый, желтый и голубой. Переходим к подключению.
Кабели A+, A-, B+ и B- от шагового двигателя подключаем к пинам 1, 2, 13 и 14 соответственно. Контакты на коннекторах 7 и 12 на контроллере L298N оставьте замкнутыми. После этого подключите источник питания к пину 4 (плюс) и 5 (минус) на контроллере.
Опять таки, если источник питания меньше 12 вольт, контакт, отмеченный 3 на рисунке модуля, можно оставить замкнутым. После этого, подключите пины модуля L298N IN1, IN2, IN3 и IN4 к соответствующим цифровым пинам D8, D9, D10 и D11 на Arduino.
Теперь подключаем GND пин с Arduino к пину 5 на контроллере, а 5V к 6 пину на модуле. С управлением шагового двигателя проблем быть не должно благодаря встроенной в Arduino IDE библиотеке Stepper Library.
 |
| Схема подключения L298N и шагового двигателя к Arduino |
Для проверки работоспособности просто загрузите скетч stepper_oneRevolution, который входит в состав библиотеки. Данный пример находится в меню
File > Examples > Stepper в Arduino IDE.
Arduino UNO урок 13 — драйвер двигателя L298N
Микросхема L298N представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. Данная микросхема находит очень широкое применение в роботостроительстве. Одна микросхема L298N способна управлять двумя двигателями и обеспечивает максимальную нагрузку до 2А на каждый двигатель, а если задействовать параллельное включение для одного двигателя, то можно поднять максимальный ток до 4А.
В данной статье я хочу рассмотреть подключение к Arduino готового модуля L298N, которые очень широко представлены на популярном аукционе ebay, AliExpress и в др. местах. Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т.д.
Сами модули на микросхемах L298N выглядят так:

Принципиальная схема такого модуля выглядит следующим образом:

Шилд имеет следующие пины подключения: Vcc — подключение внешнего питания двигателей +5 — питание логики GND — общий IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя Выключатель S1 служит для переключения питания логической части микросхемы. Т.е. при включенном S1 питание логической части берется от внутреннего преобразователя модуля. При выключенном S1 питание берется от внешнего источника. На модулях также присутствуют перемычки ENA и ENB для разрешения включения двигателей. Если необходимо, их можно также подключить к Arduino и задействовать, но это лишние 2 провода и в этих входах нет особого смысла.

ШИМ управление позволяет плавно изменять скорость вращение двигателя. Если нам не нужно ШИМ управление, то на соответствующий вход нужно просто подать логическую 1. На какой именно вход IN1 или IN2 вы подадите сигнал ШИМ, либо направление вращения — разницы не имеет. Тоже самое справедливо и для входов IN3, IN4.
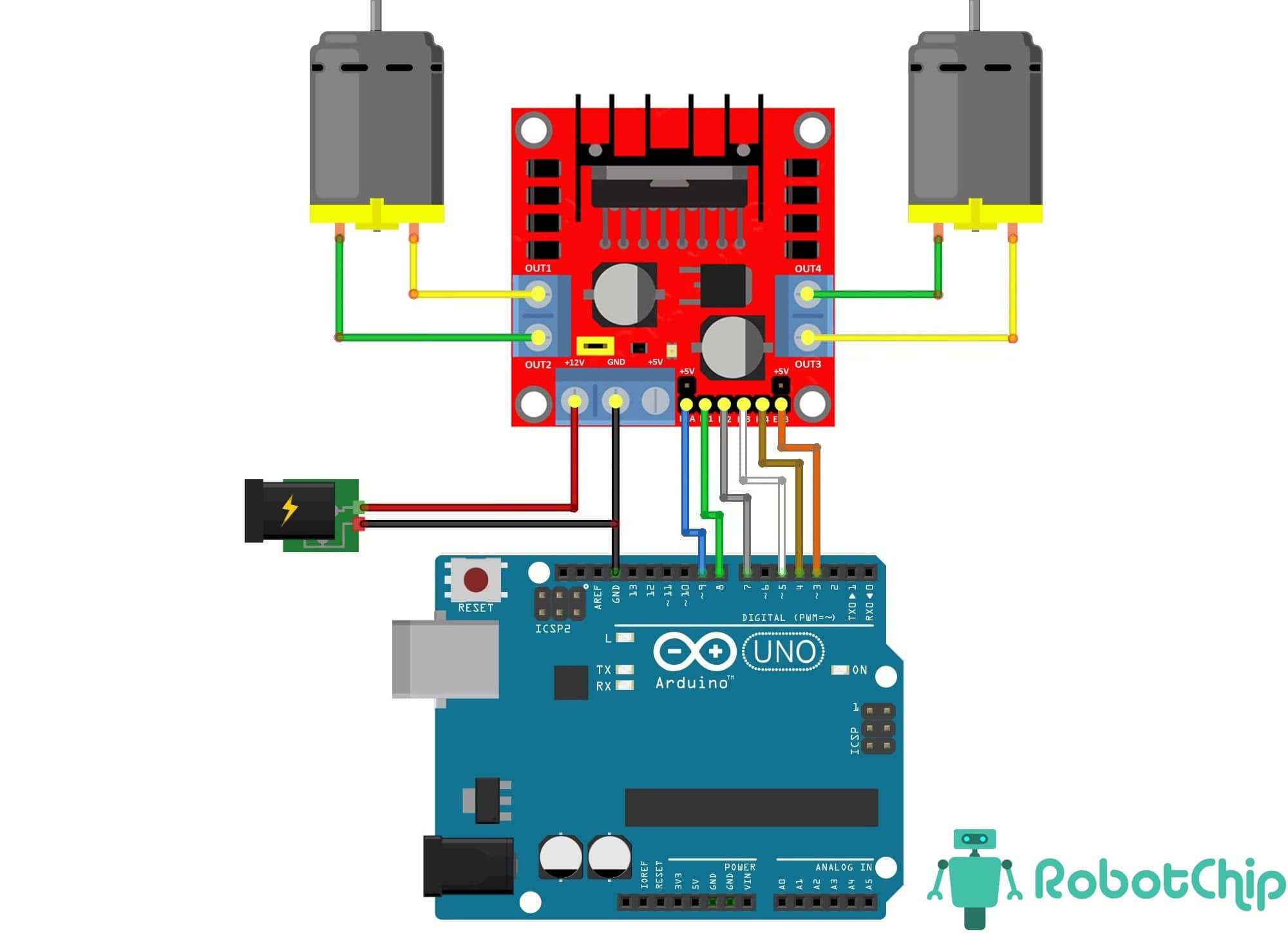
Схема подключения шилда L298N к контроллеру Arduino:

Для питания логической части схемы необходимо нажать кнопку или вставить перемычку (зависит от типа модуля). Если же на вашем модуле не предусмотрен преобразователь 5В, то дополнительно, необходимо соединить вывод 5V от Arduino к входу +5 шилда. Как видно из схемы выше, 2 и 4 вывод используются для установки направления движения, а 3 и 5 для ШИМ управления выводами.
Напишем тестовую программу, в которой мы будем в цикле изменять скорость вращения, а также направление вращения двигателей:
#define D1 2 // Направление вращение двигателя 1 #define M1 3 // ШИМ вывод для управления двигателем 1 #define D2 4 // Направление вращение двигателя 2 #define M2 5 // ШИМ вывод для управления двигателем 2 bool direction = 0; // Текущее направление вращения int value; // Текущее значение ШИМ void setup() { pinMode(D1, OUTPUT); pinMode(D2, OUTPUT); } void loop() { for(value = 0; value <= 255; value+=1) { digitalWrite(D1, direction); // Задаем направление вращения digitalWrite(D2, direction); analogWrite(M1, value); // Задаем скорость вращения analogWrite(M2, value); delay(20); } direction = direction ^ 1; // Инвертируем значение, чтобы в след. цикле вращаться в другую сторону }
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
| U1 | Драйвер электродвигателей | L298 | 1 | Поиск в магазине Отрон | В блокнот | |
| U2 | Линейный регулятор | L7805AB | 1 | Поиск в магазине Отрон | В блокнот | |
| D1-D4, D9-D12 | Диод | 8 | Поиск в магазине Отрон | В блокнот | ||
| D5-D8, D13 | Светодиод | 5 | Поиск в магазине Отрон | В блокнот | ||
| С1, С3 | Конденсатор | 0.1 мкФ | 2 | Поиск в магазине Отрон | В блокнот | |
| С2 | Электролитический конденсатор | 470 мкФ 16 В | 1 | Поиск в магазине Отрон | В блокнот | |
| R1, R2 | Резистор | 20 кОм | 2 | Поиск в магазине Отрон | В блокнот | |
| R3 | Резистор | 1 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| S1 | Кнопка | 1 | Поиск в магазине Отрон | В блокнот | ||
| Р2, Р3 | Клеммный зажим для подключения двигателя | 2 | Поиск в магазине Отрон | В блокнот | ||
| Р4 | Разьем для подключения к Arduino | 1 | Поиск в магазине Отрон | В блокнот | ||
| Р5 | Клеммный зажим для подключения питания | 1 | Поиск в магазине Отрон | В блокнот | ||
| Добавить все |
Обзор драйвера мотора на L298N

Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры
► Напряжение питания логики модуля: 5 В► Потребляемый ток встроенной логики: 36 мА► Напряжение питания драйвера: 5 В – 35 В► Рабочий ток драйвера: 2 А (пиковый ток 3 А)► Габариты: 43.5 мм х 43.2мм х 29.4мм
Общие сведения
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.

Для управления скоростью двигателя постоянного тока используется метод PWM (Широтно-импульсной модуляции).

Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
► Вывод Vss — питание двигателей, от 5 до 35 В;► Вывод GND — общий вывод заземления;► Вывод Vs — питание для логической схемы;► Перемычка ENA — используются для управления скоростью двигателя A;► Вывода IN1 и IN2 — используются для управления направлением вращения двигателя A;► Вывода IN3 и IN4 — используются для управления направлением вращения двигателя B;► Перемычка ENB — используются для управления скоростью двигателя B;► Выходы OUT1 и OUT2 — разъем для двигателя A;► Выходы OUT3 и OUT4 — разъем для двигателя B;
Принципиальная схема модуля L298N

Питание модуля.Питание модуля L298N осуществляется через трех контактный разъем, шагом 3,5 мм:► Vs — источник питания двигателей, 3B — 35B► GND — земля► Vss — источник питания модуля, 4,5В — 5,5ВФактически у модуля L298N, есть два контакта питания, а именно. «Vss» и «Vs». От «Vs» питаются двигатели с допустимым напряжением от 5 В до 35 В, а от «Vss» питается логическая схема модуля 4,5В до 5,5В. На плате установлен встроенный стабилизатор напряжения на 5 Вольт (78M05), его можно включить или отключить с помощью перемычки. Когда перемычка установлена, стабилизатор включен и питает логику модуля (Vss) от источника питания двигателя (Vs). При включенном стабилизаторе, вход «Vss» работает как выход и обеспечивает 5В с током 0,5 А. Когда перемычка убрана, стабилизатор отключен и необходимо отдельно подключить питание 5 Вольт на вход Vss.
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт

Падение напряжения L298NПадение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростьюРазъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Подключение L298N к Arduino (коллекторный двигатель)
Необходимые детали:► Arduino UNO R3 x 1 шт.► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.► Коллекторный двигатель x 2 шт.► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Осталось подключить Arduino к источнику питания и загрузить скетч.
Источник
Пример программного кода
#include // Подключаем библиотеку для работы с шилдом #include // Подключаем библиотеку для работы с сервоприводами, можно не подключать
// Подключаем двигатели к клеммникам M1, M2, M3, M4 AF_DCMotor motor1(1); AF_DCMotor motor2(2); AF_DCMotor motor3(3); AF_DCMotor motor4(4);
void setup() { // Задаем скорость вращения двигателей (аналог работы PWM или ШИМ) motor1.setSpeed(255); motor1.run(RELEASE); motor2.setSpeed(255); motor2.run(RELEASE); motor3.setSpeed(255); motor3.run(RELEASE); motor4.setSpeed(255); motor4.run(RELEASE); }
int i;
void loop() { // вращение вперед в течении 1 секунды motor1.run(FORWARD); // Вращение вперед motor2.run(FORWARD); motor3.run(FORWARD); motor4.run(FORWARD); motor1.setSpeed(255); // Указываем скорость вращения motor2.setSpeed(255); motor3.setSpeed(255); motor4.setSpeed(255); delay(1000);
/* Настоятельно советую сразу не менять направление вращения моторов. Необходим небольшой промежуток времени для переключения направления движения*/ motor1.run(RELEASE); // тормозим двигатели motor2.run(RELEASE); motor3.run(RELEASE); motor4.run(RELEASE); delay(500); // вращение Назад в течении 1 секунды motor1.run(BACKWARD); // Вращение назад motor2.run(BACKWARD); motor3.run(BACKWARD); motor4.run(BACKWARD); motor1.setSpeed(255); // Указываем скорость вращения motor2.setSpeed(255); motor3.setSpeed(255); motor4.setSpeed(255); delay(1000);
motor1.run(RELEASE); // тормозим двигатели motor2.run(RELEASE); motor3.run(RELEASE); motor4.run(RELEASE); delay(500); // Постепенно ускоряем моторы в одном направлении motor1.run(FORWARD); // Вращение вперед motor2.run(FORWARD); motor3.run(FORWARD); motor4.run(FORWARD); for (i=0; i<255; i++) { motor1.setSpeed(i); // Указываем скорость вращения motor2.setSpeed(i); motor3.setSpeed(i); motor4.setSpeed(i); delay(10); }
motor1.run(RELEASE); // тормозим двигатели motor2.run(RELEASE); motor3.run(RELEASE); motor4.run(RELEASE); delay(500); // Постепенно ускоряем моторы в одном направлении motor1.run(BACKWARD); // Вращение вперед motor2.run(BACKWARD); motor3.run(BACKWARD); motor4.run(BACKWARD); for (i=255; i>=0; i—) { motor1.setSpeed(i); // Указываем скорость вращения motor2.setSpeed(i); motor3.setSpeed(i); motor4.setSpeed(i); delay(10); }
motor1.run(RELEASE); // тормозим двигатели motor2.run(RELEASE); motor3.run(RELEASE); motor4.run(RELEASE); delay(500); }
Подключение модуля L298N
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.
HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками , где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.
Подключение L298N к плате Arduino
Причем некоторые пины должны поддерживать ШИМ-модуляцию. При этом есть возможность изменять скорость и направление вращения моторов. В данном примере рассматривается мост собранный на полупроводниках.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к модулю L для управления через Raspberry Pi.
HIGH ждем 5 секунд. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
Обзор драйвера L298N
Драйвер L298N используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. На рисунке №1 показан внешний вид модуля с кратким описанием всех его составляющих.
Рисунок №1 – внешний вид модуля L298N
- OUT1 и OUT2 – разъёмы для подключения первого щёточного двигателя или первой обмотки шагового двигателя;
- OUT3 и OUT4 – разъёмы для подключения второго щёточного двигателя или второй обмотки шагового двигателя;
- VSS – вход для питания двигателей (максимальный уровень +35V);
- GND – общий провод (не забываем соединить с аналогичным входом Arduino. );
- Vs – вход для питания логики +5V. Через него непосредственно запитывается сама микросхема L298N. Есть ещё второй способ питания, при котором 5V для L298N берётся от встроенного в модуль стабилизатора напряжения. В таком случае на разъём подаётся только питание для двигателей (Vss), контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.
- IN1, IN2 – контакты управления первым щёточным двигателем или первой обмоткой шагового двигателя.
- IN3, IN4 – контакты управления вторым щёточным двигателем или второй обмоткой шагового двигателя.
- ENA, ENB – контакты для активации/деактивации первого и второго двигателей или соответствующих обмоток ШД. Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль – запрещает. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал. Для работы с шаговым двигателям, как правило, на эти контакты ставят перемычки, обеспечивающие постоянную подтяжку к +5V.
На рисунке №2 показана электрическая схема модуля L298N.
Рисунок №2 – электрическая схема модуля L298N
Как видно из вышеприведенной схемы, основным элементом модуля является микросхема L298N, в состав которой входят два полноценных H-моста. Каждый H-мост выполнен в виде сборки из четырёх транзисторных ключей с включённой в центре нагрузкой в виде обмотки двигателя. Такой подход позволяет менять полярность в обмотке и как следствие направление вращения двигателя путём чередования пар открытых и закрытых ключей. Более наглядно этот процесс демонстрирует рисунок №3.
Рисунок №3 – транзисторные мосты Н-типа
На рисунке изображены два транзисторных моста Н-типа. В первом случае на вход IN1 подаётся логическая единица, а на вход IN2 – логический ноль. Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. Ввиду того, что единственный путь протекания тока лежит через обмотку двигателя, то последний окажется подключен правой клеммой к плюсу питания, а левой к минусу. Всё это приведёт к вращению мотора в определённом направлении. Абсолютно противоположная картина показана на нижнем рисунке. Здесь IN3 установлен в логический ноль, а IN4 в логическую единицу. Теперь ток течёт в обратном направлении (левая клемма – плюс, правая – минус), заставляя второй двигатель крутиться в противоположную сторону.
Настройка микрошага драйвера DRV8825.

Драйвер DRV8825 может работать в микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровнем. Например, если взять двигатель NEMA17 с шагом 1.8 градусов или 200 шагов на оборот, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот.
Дня настройки микрошага на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Выводы M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825.

При интенсивной работе микросхемы драйвер DRV8825 начинает сильно греться и если температура превысит предельное значение, то он может сгореть. По документации DRV8825 может работать с током до 2,5 А. на катушку, но на практике микросхема не греется, если ток не превышает 1,2 А. на катушку. Поэтому если ток выше 1,2 А. необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Описание драйвера мотора L298N
Модуль L298N состоит из 4 транзисторов и 2 H-мостов, соединенных с выходами A и B. Комплектующие изготавливаются из стали или латуни. На драйвере присутствует разъем для подачи питания и подключения различных перемычек.
Логическая микросхема L298N имеет следующую распиновку:
Распиновка модуля была разработана на основе микросхемы L293D. Принцип работы этого устройства основан на чередовании сигналов высокого логического уровня или низкого. Направление двигателей определяется портами IN1 — IN4.
Драйвер функционирует в 2 основных режимах:
Не рекомендуется выключать стабилизатор, если напряжение модуля ниже 12 В.
Похожие записи:
 Активное, емкостное и индуктивное сопротивление. закон ома для цепей переменного тока
Активное, емкостное и индуктивное сопротивление. закон ома для цепей переменного тока
 Ретро проводка в современном доме
Ретро проводка в современном доме
 Где используется фидерный кабель
Где используется фидерный кабель
 Маркировка smd компонентов: кодовые обозначения
Маркировка smd компонентов: кодовые обозначения
 Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
 Как подключить усилитель в машине
Как подключить усилитель в машине