Простой ШИМ-регулятор мощности своими руками
Вам понадобится
- — микросхема NE555
- — два резистора по 1 кОм
- — резистор 100 Ом
- — переменный резистор 50 кОм
- — три диода 1N4148
- — конденсатор 2,7 нФ
- — конденсатор 1 нФ
- — транзистор IRFZ44
Инструкция
Первым делом необходимо приготовить все необходимые детали для сборки схемы. Желательно точно придерживаться точных номиналов, но если найти их не удалось — не беда, можно ставить самые ближайшие. Диоды 1N4148 можно заменить на КД522 или 1N4007, транзистор IRFZ44 можно смело поменять на IRF730, IRF630 или другие аналогичные.
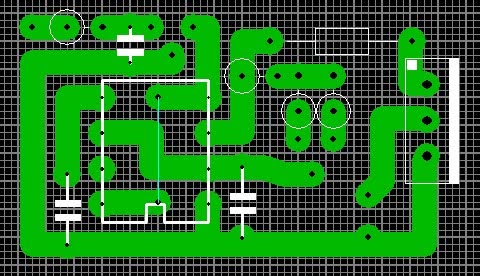
Когда все детали собраны, можно приступить к изготовлению печатной платы, на которой будет собрана схема. Изготавливается она методом ЛУТ, т.к. это самый доступный и простой метод изготовления печатных плат в домашних условиях.
Сам рисунок можно нарисовать в компьютерных программах, например, Sprint Layout, либо от руки лаком. Рисунок должен полностью соответствовать схеме, только тогда плата будет работоспособна. Соседние дорожки не должны проходить слишком близко друг к другу, иначе не избежать замыкания.
После нанесения на текстолит защитного слоя дорожек, плату можно вытравливать. Для этого в плоскую пластиковую ёмкость наливаем стакан воды, насыпаем столовую ложку лимонной кислоты и чайную ложку соли. Перемешиваем, кладём плату, примерно через 20-30 минут лишняя медь сойдёт с платы, а раствор станет зеленоватым.
Теперь осталось лишь снять защитный слой растворителем, просверлить отверстия, залудить дорожки, и плата готова.

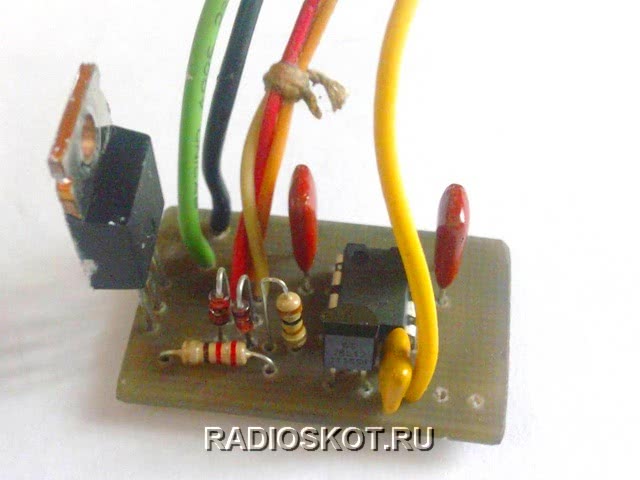
Когда плата готова, можно запаивать детали. Сначала на плату устанавливаются резисторы, диоды, затем конденсаторы, и уже в последнюю очередь транзистор и микросхема.
Провода для подключения нагрузки и питания удобнее всего вывести через клеммник. После завершения пайки обязательно нужно проверить правильность монтажа, смыть остатки флюса и прозвонить соседние дорожки на замыкание.
ШИМ-регулятор готов, можно подключать его к источнику питания, нагрузке и проверять работу.
Обратите внимание
Полевые транзисторы довольно чувствительны к статике, поэтому во время установки транзистора на плату желательно соединить его выводы полоской из фольги. Тогда они будут замкнуты и не пострадают от статики.
Полезный совет
Перед установкой на плату каждой детали желательно её прозвонить, убедится в исправности. Ни в коем случае нельзя торопиться, ведь даже малейшая ошибка может привести к тому, что регулятор не заработает.
Простой ШИМ регулятор 0-100 для светодиодного светильника на 555 таймере, или модернизация торшера
Светодиоды светят на все 14W, оставляя ослепительные впечатления у сетчатки, драйвера греются рассеивая лишние 5W энергии в тепло, а ШИМ… да не было у нас изначально ШИМа.
Для ШИМа я решил взять (в первый раз в своей жизни) универсальную микросхему — NE555. В интернете было найдено достаточно много схем ШИМа, и после сборки одной из них я получил крутилку яркости от 5% до 95%, что не подходило для данной конструкции и методом проб и ошибок, а так-же эмуляции всего этого безумия в Протеусе я достиг результата! Пришлось использовать таймер немножко «наоборот» — выход таймера используется для заряда/разряда конденсатора, а вывод разряда конденсатора использовать как выход.
| Схема ШИМа 0-100% |
Переменный резистор — самое критичное место схемы! Для плавной регулировки необходимо использовать резистор с Логарифмической зависимостью на сопротивление 10k — 100k (можно и другие, но частоту придется подобрать конденсатором).
Во время экспериментов были мысли о использовании вместо таймера контроллера — оцифровывать напряжение с переменника, и выдавать соответствующее заполнение ШИМа, но нас «попустило»)
Небольшой фото отчет с будущей электроникой торшера:
| Вся электроника |
| Светодиоды |
| ШИМ |
Файлы для Proteus — вот (Осторожно! Схема отличается, но это сделано для обеспечения возможности работы в эмуляторе, в реальных условиях схема из статьи — работает)
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора
Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И
В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
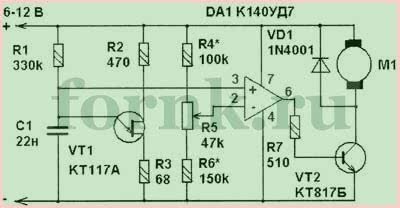
Регулятор скорости вращения двигателя
ШИМ: 0%-99%, напряжение: 5…16 В, ток: 10A….
Регулятор оборотов коллекторного двигателя
Мощность: 400 Вт, обороты: 90-1400 об/мин, 220В/50Гц…
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
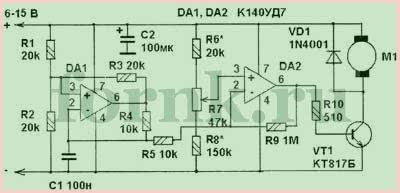
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
СХЕМА ШИМ РЕГУЛЯТОРА
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсно модулируемые) регуляторы. Схема универсальная — она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
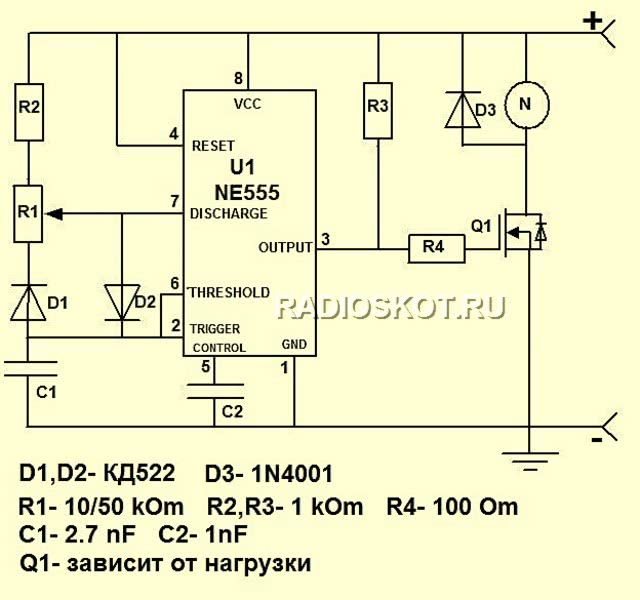
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.

Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
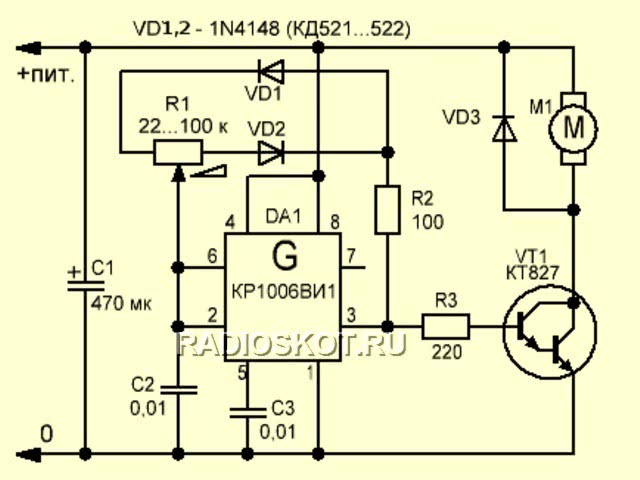
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 — 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума — открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю — система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1
Меняя отношение сопротивлений заряда/разряда — меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором
Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел — подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Что такое аттенюатор, принцип его работы и где применяется
Что такое частотный преобразователь, основные виды и какой принцип работы
Преобразователи напряжения с 12 на 220 вольт
Что такое диодный мост, принцип его работы и схема подключения
Что такое триггер, для чего он нужен, их классификация и принцип работы
Схема ШИМ на 12 В для ламп
Напряжение от трансформатора выпрямляется мостом на 50 А, установленным на радиаторе. Подается оно далее на стабилизатор 8 В, а затем в схему управления. Устройство должно было работать с несколькими галогенками 12 В 50 Вт.
Кстати, вы можете хорошо уменьшить нагрев транзисторов снизив частоту коммутации — на это стоит обратить внимание
При полной яркости будет ток в нагрузке около 25 А
Так что уделите особое внимание винтовым соединительным разъемам. Кабели сечением 1,5 мм2 тоже недостаточны для такого большого тока
Конечно, затворы лучше переключать напряжением около 10 — 12 В (не более 15 В для безопасности МОП-транзисторов), чем 6 В, хотя бы для того чтобы быть уверенным в их насыщении во включенном состоянии. А более высокое напряжение также означает более быструю перезагрузку затворов, что приводит к более короткому переходному времени, а это снижает потери мощности на них. Если они не насыщаются, то тепло, генерируемое на них с высокой рабочей мощностью, заставит транзисторы сильно греться.
Вместо резистора R3 ещё лучше ставить резисторы 5-10 Ом в затворах mosfet и использовать более мощные биполярные транзисторы, например семейства BD136 — BD140 соответствующих типов проводимости.
Схема шим регулятора
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности.
Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсно модулируемые) регуляторы.
Схема универсальная — она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.
Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 — 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума — открывается внутренний транзистор. Который замыкает вывод DIS на землю.
При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю — система перекинется в противоположное состояние — на выходе 1, транзистор закрыт.
Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе.
Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1
Меняя отношение сопротивлений заряда/разряда — меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором
Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев.
В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
- Форум по широтно-импульсным регуляторам
- Обсудить статью Схема шим регулятора
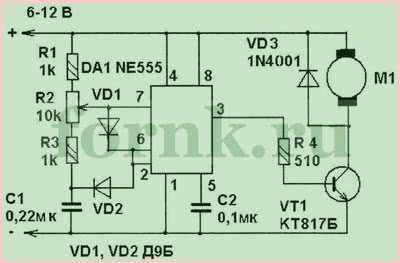
Регулятор оборотов двигателя постоянного тока 12 вольт
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Простой ШИМ регулятор

Регулировать напряжение питания мощных потребителей удобно с помощью регуляторов с широтно-импульсной модуляцией. Преимущество таких регуляторов заключается в том, что выходной транзистор работает в ключевом режиме, а значить имеет два состояния — открытое или закрытое. Известно, что наибольший нагрев транзистора происходит в полуоткрытом состоянии, что приводит к необходимости устанавливать его на радиатор большой площади и спасать его от перегрева.
Предлагаю простую схему ШИМ регулятора. Питается устройство от источника постоянного напряжения 12В. При указанном экземпляре транзистора, выдерживает ток до 10А.
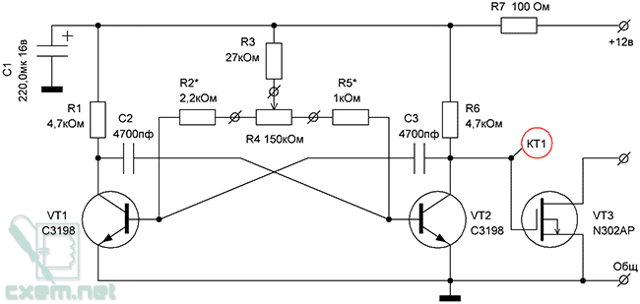
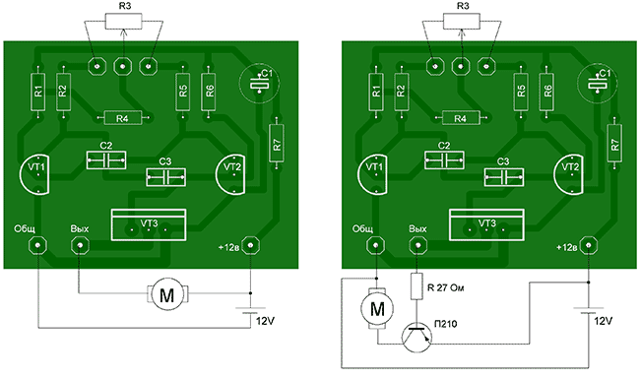
Рассмотрим работу устройства: На транзисторах VT1 и VT2 собран мультивибратор с регулируемой скважностью импульсов. Частота следования импульсов около 7кГц
С коллектора транзистора VT2 импульсы поступают на ключевой транзистор VT3, который управляет нагрузкой.
Скважность регулируется переменным резистором R4. При крайнем левом положении движка этого резистора, см
верхнюю диаграмму, импульсы на выходе устройства узкие, что свидетельствует о минимальной выходной мощности регулятора. При крайнем правом положении, см.
нижнюю диаграмму, импульсы широкие, регулятор работает на полную мощность.

С помощью данного регулятора можно управлять бытовыми лампами накаливания на 12 В, двигателем постоянного тока с изолированным корпусом.
В случае применения регулятора в автомобиле, где минус соединён с корпусом, подключение следует выполнять через p-n-p транзистор, как показано на рисунке.
Детали: В генераторе могут работать практически любые низкочастотные транзисторы, например КТ315, КТ3102.
Ключевой транзистор IRF3205, IRF9530. Транзистор p-n-p П210 заменим на КТ825, при этом нагрузку можно подключать на ток до 20А!
И в заключении следует сказать, что данный регулятор работает в моей машине с двигателем обогрева салона уже более двух лет.
Скачать список элементов (PDF)
Прикрепленные файлы:
PWM_regulator.rar (12 Кб)
Гильванов А. Опубликована: 2012 г. 1 Вознаградить Я собрал 0 0
x
- Техническая грамотность
- Актуальность материала
- Изложение материала
- Полезность устройства
- Повторяемость устройства
- Орфография
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
Самый простой вариант это микросхема NE555, собирается всё по схеме:
Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт
Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup() {
pinMode(3,OUTPUT); // опреднляем пин D3 как выход
}
void loop() {
int duty = 30; // определяем скважность равной 30%
int value = 255/10*duty; // переводим значение скважности в 8 битный формат
analogWrite(3, value); // выводим ШИМ значением value на пин D3
1
2
3
4
5
6
7
voidsetup(){
pinMode(3,OUTPUT);// опреднляем пин D3 как выход
}
voidloop(){
intduty=30;// определяем скважность равной 30%
intvalue=25510*duty;// переводим значение скважности в 8 битный формат
analogWrite(3,value);// выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:
ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %. Меняем скважность в коде — меняется и скважность на выходе
Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Arduino и ШИМ
В уроке про функции времени я рассказывал, что у микроконтроллера есть так называемые счётчики, которые считают “пинки” от тактового генератора (кварца). Данные счётчики как раз и генерируют ШИМ сигнал, т.е. само вычислительное ядро микроконтроллера в этом не участвует. Помимо расчётов, даже вывод сигнала с ноги МК ложится на плечи счётчика
Это очень важно понимать, потому что ШИМ сигнал не тормозит выполнение кода, так как его генерацией занимается буквально “другая железка”. На платах UNO/Nano/Pro Mini у нас есть три таймера-счётчика, у каждого таймера есть по два выхода на пины МК, то есть у нас есть 2*3=6 пинов, способных генерировать ШИМ сигнал
Для генерации ШИМ у нас есть готовая функция analogWrite(pin, duty)
- pin – пин, являющийся выводом таймера. Для Нано/Уно это пины D3, D5, D6, D9, D10, D11. На некоторых платах они помечены * звёздочкой, а вообще для определения ШИМ пинов на любой другой модели Ардуино достаточно загуглить распиновку
- duty – заполнение ШИМ сигнала. По умолчанию все “выходы” ШИМ у нас 8-битные, то есть duty может принимать значение с “разрешением” 8 бит, а это 0-255
Совместим эти знания с прошлым уроком и попробуем менять яркость светодиода, подключенного через резистор к пину D3. Потенциометр подключен к пину A0
void setup() { pinMode(3, OUTPUT); // D3 как выход } void loop() { // ШИМ на 3 пин, 1023/4 = 255 — перевели диапазон analogWrite(3, analogRead(0) / 4); delay(10); }
Рассмотренный пример меняет яркость светодиода в зависимости от положения рукоятки потенциометра. Пару слов о “стандартном” ШИМ сигнале – мы получаем его с такими настройками, какие нам даёт библиотека Arduino.h, а настройки эти сильно занижены по сравнению с возможностями Arduino. Про “улучшение” ШИМ мы поговорим позже, а сейчас давайте глянем на характеристики ШИМ “из коробки”:
| Таймер | Пины | Частота | Разрешение |
| Timer 0 | D5 и D6 | 976 Гц | 8 бит (0-255) |
| Timer 1 | D9 и D10 | 488 Гц | 8 бит (0-255) |
| Timer 2 | D3 и D11 | 488 Гц | 8 бит (0-255) |
Это весьма плачевные цифры, особенно по частоте. Все таймеры приведены под одну гребёнку, чтобы пользователь не думал не гадал и лишнюю документацию не изучал. К изменению частоты и разрядности ШИМ мы вернёмся в отдельном уроке, а пока что можете посмотреть данный урок в видео варианте.
Похожие записи:
 Как выставить зажигание с помощью стробоскопа?
Как выставить зажигание с помощью стробоскопа?
 Сигнализация действия защиты и автоматики
Сигнализация действия защиты и автоматики
 Подключение потолочного светильника со светодиодами
Подключение потолочного светильника со светодиодами
 Маркировка smd компонентов: кодовые обозначения
Маркировка smd компонентов: кодовые обозначения
 Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
 Как подключить усилитель в машине
Как подключить усилитель в машине