Содержание
Разновидности электромоторов
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
- синхронные;
- асинхронные;
- коллекторные,
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
Принцип работы
Заключается в формировании электромагнитного поля вокруг проводника, по которому протекает электрический ток. Для асинхронного электродвигателя данный процесс начинается сразу после подачи напряжения на обмотки статора, после чего в роторе наводится ЭДС взаимоиндукции, индуцирующей вихревые токи в металлическом каркасе. Наличие вихревых токов обуславливает генерацию собственной ЭДС, которая формирует электромагнитное поле ротора. Наиболее эффективный КПД асинхронной электрической машины получается при работе от трехфазной сети.
Конструктивно обмотки статора имеют смещение в пространстве друг относительно друга на 120°, что показано на рисунке 2 ниже:

Такой прием позволяет отстроить магнитное поле рабочих обмоток в строгом соответствии с напряжением трехфазной сети, которое имеет аналогичную разность кривых электрической величины.
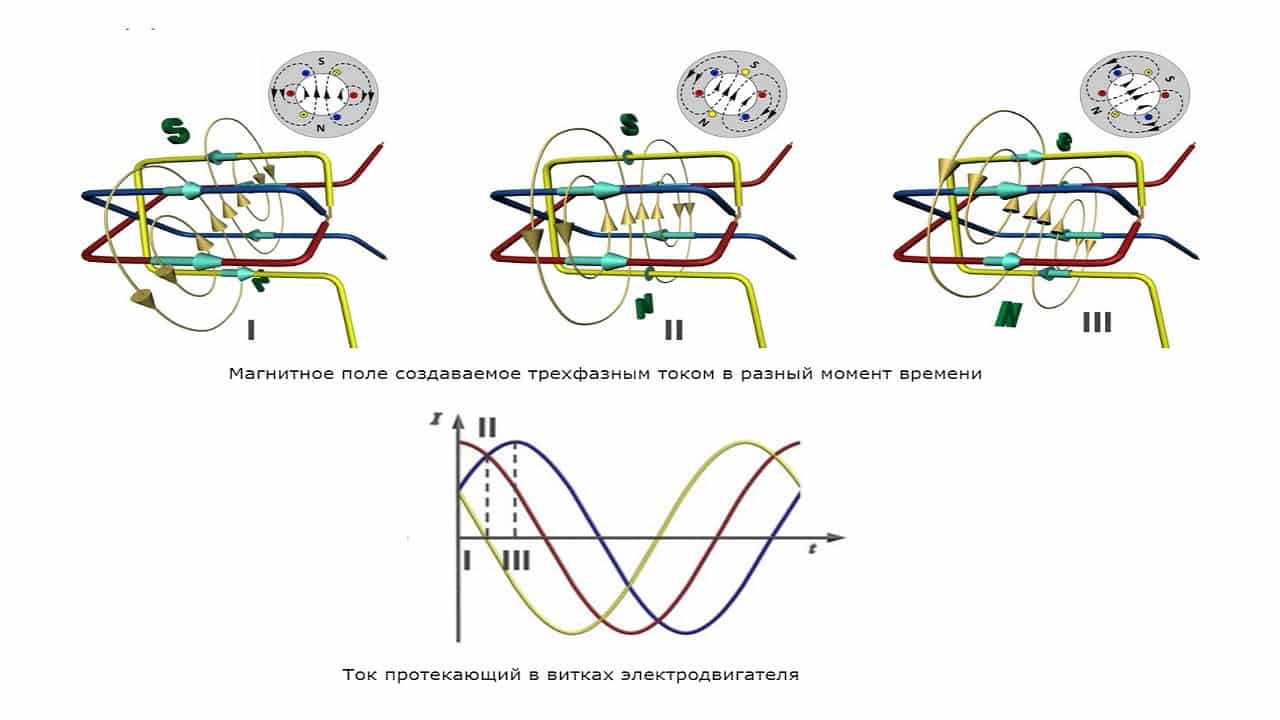
На рисунке 3 выше все три фазы изображены в разных цветах для упрощения понимания процесса, также здесь изображена кривая токов, протекающих в фазах асинхронного электродвигателя. Теперь рассмотрим физические процессы в обмотках двигателя для трех позиций показанных на рисунке:
- I – в этой позиции максимальный ток протекает в красной обмотке электродвигателя, а значение силы тока в желтой и синей равны. Основной поток силовых линий формируется красной фазой, а два других дополняют его.
- II – в данной точке желтая синусоида равна нулю, поэтому никакого потока не создает, а сила тока красной и синей равны. Поток формируется сразу двумя фазами и смещается по часовой стрелке вправо, совершая поворот.
- III – третья точка характеризуется максимумом токовой нагрузки для синей кривой, а красная и желтая имеет равную амплитуду, но противоположную по направлению. В результате чего максимум магнитных линий южного и северного полюса сместиться еще на 30°.
По данному принципу магнитное поле статора вращается в асинхронной электрической машине в течении периода. За счет магнитного взаимодействия с полем статора асинхронного электродвигателя происходит поступательное движение ротора вокруг своей оси. Можно сказать, что ротор пытается догнать поле статора. Именно за счет разницы во вращении полей данный тип электрической машины получил название асинхронной.
Типы двигателей постоянного тока
Двигатель постоянного тока является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется. Их исполшьзуют в таких устройствах, как регулирование скорости, управление сервоприводом.
Доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему. Коммутация достигается с помощью электроники. Они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, имеют более длительный срок эксплуатации.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им. Используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Производители электродвигателей
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод “Электродвигатель” | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО “Электрические машины” | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР –
- АДФР –
- СДОВ – синхронный двигатель с обмоткой возбуждения
- СДПМ – синхронный двигатель с постоянными магнитами
- СРД – синхронный реактивный двигатель
- СГД – синхронный гистерезисный двигатель
- УД – универсальный двигатель
- КДПТ – коллекторный двигатель постоянного тока
- КДПТ ОВ –
- КДПТ ПМ –
Производители электродвигателей ближнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Беларусь | Могилевский завод “Электродвигатель” | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод “Укрэлектромаш” | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
ГОСТ 16264.0-85 Электродвигатели малой мощности
А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011.
Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.

История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока. Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
https://youtube.com/watch?v=uPdv7l9zx2c
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.

Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу , зависящую от тока и напряжённости магнитного поля . Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.

Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Доработка схемы
Если вход схемы подключен к push-pull выходу, то особой доработки не
требуется. Рассмотрим случай, когда вход — это просто выключатель,
который либо подтягивает базу к питанию, либо оставляет её «висеть в
воздухе». Тогда для надёжного закрытия транзистора нужно добавить ещё
один резистор, выравнивающий напряжение между базой и эмиттером.
Кроме того, нужно помнить, что если нагрузка индуктивная, то
обязательно нужен защитный диод. Дело в том, что энергия, запасённая
магнитным полем, не даёт мгновенно уменьшить ток до нуля при
отключении ключа. А значит, на контактах нагрузки возникнет напряжение
обратной полярности, которое легко может нарушить работу схемы или
даже повредить её.
Совет касательно защитного диода универсальный и в равной степени
относится и к другим видам ключей.
Если нагрузка резистивная, то диод не нужен.
В итоге усовершенствованная схема принимает следующий вид.
Резистор R2 обычно берут с сопротивлением, в 10 раз большим, чем
сопротивление R1, чтобы образованный этими резисторами делитель не
понижал слишком сильно напряжение между базой и эмиттером.
Для нагрузки в виде реле можно добавить ещё несколько
усовершенствований. Оно обычно кратковременно потребляет большой ток
только в момент переключения, когда тратится энергия на замыкание
контакта. В остальное время ток через него можно (и нужно) ограничить
резистором, так как удержание контакта требует меньше энергии.
Для этого можно применить схему, приведённую ниже.
В момент включения реле, пока конденсатор C1 не заряжен, через него
идёт основной ток. Когда конденсатор зарядится (а к этому моменту реле
перейдёт в режим удержания контакта), ток будет идти через резистор
R2. Через него же будет разряжаться конденсатор после отключения реле.
Ёмкость C1 зависит от времени переключения реле. Можно взять,
например, 10 мкФ.
С другой стороны, ёмкость будет ограничивать частоту переключения
реле, хоть и на незначительную для практических целей величину.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ. Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Принцип действия электродвигателя
В нашем случае, принцип действия тот же, но роль неподвижного однородного магнитного поля играет статор, а рамки – вращающийся ротор электродвигателя, обмотками, который еще называется якорем.
Как видим, два полюса статора создают однородное магнитное поле. Обмотка ротора состоит из двух частей, которые наматываются на его полюсах и соединены между собой последовательно. Концы обмоток замыкаются на разделенных, расположенных на валу электродвигателя коллекторных пластинах. Они имеют физический контакт (трение) с неподвижными щетками из графита, на которые подается пост. ток. Если при подключении соблюсти принцип расположение полюсов тока, как показано на рисунке, то полюс якоря, расположенный на схеме слева, станет условно северным, как и находящийся в непосредственной близости полюс статора электродвигателя.
Естественная реакция на действие магнитных сил заключается в том, что равнозначные полюса отталкиваются. В нашем случае такое возможно только за счет вращения. По инерции, северный полюс якоря, провернувшись на 180º станет напротив южного полюса статора. По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
Учитывая эту информацию устройство двигателя постоянного тока можно изобразить следующим образом:
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности. Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
обмотки статора выполняют функцию фиксирующего элемента
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор
Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока. Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Похожие записи:
 Как выставить зажигание с помощью стробоскопа?
Как выставить зажигание с помощью стробоскопа?
 Сигнализация действия защиты и автоматики
Сигнализация действия защиты и автоматики
 Подключение потолочного светильника со светодиодами
Подключение потолочного светильника со светодиодами
 Маркировка smd компонентов: кодовые обозначения
Маркировка smd компонентов: кодовые обозначения
 Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
 Как подключить усилитель в машине
Как подключить усилитель в машине