Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.

В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.

Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.

Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.

Ранние разработки
В 1821 году, после открытия феномена связи электричества и магнетизма, датским химиком Эрстедом, теоремы Ампера и закона Био — Савара, английский физик Майкл Фарадей построил два аппарата, которые он назвал «электромагнитное вращение»: непрерывное круговое движение магнитной силы вокруг провода — это фактическая демонстрация первого электродвигателя.
В 1822 году Питер Барлоу построил то, что можно считать первым электродвигателем в истории: «колесо Барлоу». Это устройство представляет собой простой металлический диск, нарезанный звездой, и концы которого погружаются в чашку, содержащую ртуть, обеспечивающая текущий поток. Однако он создает только силу, способную ее поворачивать, не допуская ее практического применения.
Первый экспериментально используемый коммутатор был изобретен в 1832 году Уильямом Стерджоном. Первый двигатель постоянного тока, изготовленный с целью продажи, был изобретен Томасом Давенпортом в 1834 году и запатентован в 1837 году. Эти двигатели не испытали никакого промышленного развития из-за высокой стоимости батарей в то время.
Электродвигатель с DC
Коммутируемый аппарат постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу. На валу также имеется коммутатор, долговременный поворотный электрический выключатель, который периодически меняет поток тока в обмотках ротора при вращении вала. Таким образом, каждый мостовой мотор постоянного тока имеет переменный ток, проходящий через вращающиеся обмотки. Ток протекает через одну или несколько пар щеток, которые несут на коммутаторе; щеточки соединяют внешний источник электроэнергии с вращающейся арматурой.
Вращающаяся арматура состоит из одной или нескольких катушек проволоки, намотанной вокруг ламинированного ферромагнитного сердечника. Ток от щетки протекает через коммутатор и одну обмотку якоря, делая его временным магнитом (электромагнитом). Магнитное поле, создаваемое якорем, взаимодействует со стационарным магнитным полем, создаваемым либо PM, либо другой обмоткой (полевой катушкой), как часть каркаса двигателя.
Сила между двумя магнитными полями имеет тенденцию вращать вал двигателя. Коммутатор переключает питание на катушки при повороте ротора, удерживая магнитные полюса, от когда-либо полностью совпадающего с магнитными полюсами поля статора, так что ротор никогда не останавливается (как стрелка компаса), а скорее вращается пока есть питание.
Хотя большинство коммутаторов являются цилиндрическими, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (как правило, не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щетки, для максимизации мощности двигателя, но небольшие щеточки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать, без чрезмерного отскока и искрения щеток. Более жесткие пружины для щеток также могут использоваться для создания щеток заданной массы на более высокой скорости, но за счет больших потерь из-за трения и износа ускоренной щетки и коммутатора. Поэтому конструкция электродвигателя постоянного тока влечет за собой компромисс между выходной мощностью, скоростью и эффективностью/износом.
Конструкция двигателей с DC:
- Схема арматуры — обмотка, в ней переносится ток нагрузки, который может быть неподвижной или вращающейся частью двигателя или генератора.
- Полевая схема — набор обмоток, создающих магнитное поле, так что электромагнитная индукция может существовать в электрических машинах.
- Коммутация. Механическая техника, в которой может быть достигнута ректификация, или благодаря чему может быть получен постоянный ток.
Существует четыре основных типов электродвигателей постоянного тока:
- Электродвигатель с шунтовой намоткой.
- Электродвигатель постоянного тока.
- Комбинированный двигатель.
- Двигатель PM.
https://youtube.com/watch?v=sCVZ7tsluC8
Способы определения мощности электродвигателя
Подключайте двигатель только к тому источнику тока, напряжение которого вы точно знаете. Теперь подключите к цепи обмотки амперметра, но не все сразу, а по отдельности. Это даст вам возможность узнать, каких значений достигает рабочий ток. Затем просуммируйте все те показатели, которые вы получили.
Число, которое у вас получилось, необходимо умножить на предельное напряжение в сети. Полученный результат и станет значением той мощности, которую будет потреблять двигатель.
Можно найти этот показатель и другим способом. Вычислите скорость вращения вала устройства, пользуясь при этом тахометром. После этого возьмите динамометр, чтобы найти тяговое усилие электродвигателя. Чтобы получить окончательный результат, стоит умножить число 6,28 на частоту вращения, а также на радиус вала.
Последний показатель можно получить, измерив соответственный элемент линейкой. Теперь вы знаете, какая мощность понадобится для эффективной работы двигателя.
С измерением мощности вы уже успели разобраться. Но какие же плюсы и минусы есть у данных устройств?
Достоинства электродвигателей:
- КПД достигает 95%, что позволяет пользоваться данным оборудованием во всех отраслях промышленности;
- процесс работы полностью исключает потери на трение трансмиссии;
- начало запуска электродвигателя подразумевает под собой достижение максимального крутящего момента, поэтому пользоваться коробкой передач не придется;
- вам не придется тратить много денег на ремонт и обслуживание устройства;
- электродвигатель не выбрасывает в окружающую среду вредные компоненты;
- конструкция механизмов упрощена;
- электродвигатель самостоятельно осуществляет процесс торможения.
Недостатки устройств:
- емкость аккумулятора автономных электродвигателей ограничена, поэтому они не могут работать слишком долго;
- катушки устройства нагреваются, что приводит к значительным потерям энергии;
- вам придется потратить деньги на покупку аккумуляторов;
- подзаряжается батарея довольно долго, поэтому вы потеряете немало времени.
Это основные моменты, которые касаются современных электродвигателей. Если вы сделаете выбор в пользу такого устройства, то процесс работы будет идти гораздо быстрее и эффективнее.
Если техническая документация к двигателю утеряна, а надписи на корпусе стерлись или не читаемы, возникает вопрос: как определить мощность электродвигателя без бирки? Существуют несколько методов, о которых мы вам расскажем, и вам останется выбрать из них наиболее удобный в вашем случае.
Расчет тока электродвигателя
Расчет тока электродвигателя
Расчет номинального тока трехфазного асинхронного электродвигателя
Для корректного выбора системы электрификации подъемно – транспортного механизма будь то троллейный шинопровод или кабельный подвод, необходимо знать номинальный ток электрической установки.
Ниже приведена форма расчета трехфазного асинхронного электродвигателя переменного тока:
Iн=Pн/√3*Uн*cosφн*ηн или Pн/1,73*Uн*cosφн*ηн,
где Рн — номинальная мощность электродвигателя (Вт),
Uн — номинальное напряжение электродвигателя (В),
ηн — номинальный коэффициент полезного действия двигателя,
cos φн — номинальный коэффициент мощности двигателя.
Номинальные данные электродвигателя указываются на заводской шильде или в иной технической документации, прилагаемой к электродвигателю.
Для удобства приведем пример расчета:
Необходимо определить номинальный ток трехфазного асинхронного электродвигателя переменного тока,
если Рн = 25 кВт, номинальное напряжение Uн = 380 В, номинальный коэффициент
полезного действия ηн = 0,9, номинальный коэффициент мощности cos
φн = 0,8.
Номинальное напряжение трехфазной сети 380 В — соединение обмоток двигателя по схеме «звезда».
Номинальное напряжение трехфазной сети 220 В — соединение обмоток двигателя по схеме «треугольник».
Переводим номинальную мощность из кВт в Ватты:
Pн = 25 кВт = 1000*25 = 25000 Вт
Далее:
Iн = 25000/√3*380 * 0,8 * 0,9 = 25000/1,73*380*0,8*0,9 = 52,8 А.
- Рекомендуем
- Комментарии
IP65 степень герметичности оборудования
IP-рейтинг (Ingress Protection Rating, входная защита) — система классификации степеней защиты оболочки электрооборудования от проникновения твёрдых предметов и воды в соответствии с международным стандартом IEC 60529 (DIN 40050, ГОСТ 14254-96).
К примеру, радиоуправление для крана F21-E1B имеет класс герметизации IP-65. Первая цифра означ…
МЕДЬ и МЕДНЫЙ ПРОКАТ
Марки меди и их химический состав определен в ГОСТ 859-2001. Сокращенная информация о марках меди приведена ниже (указано минимальное содержание меди и предельное содержание только двух примесей – кислорода и фосфора):
Марка
Медь
О2
P
Способ получения, основные примеси
М00к
99.98
0.01
—
Медные катоды:продукт электролитического рафинир…
Перевод крана на управление с пола
Перевод крана на управление с пола.
При осуществлении перевода мостовых или козловых кранов, на дистанционное управление с пола могут быть применены кабельные пульты управления либо беспородные пульты управления грузоподъемными кранами. Полный перечень операций и систем контроля крановой кабины, должны соответствовать функционалу пульта, согласно РД 24.09…
Троллейный шинопровод HFP
Троллейный шинопровод HFP
Описание
— Контактно – защищенный троллейный шинопровод HFP H предназначен для внутренней и внешней установки.
— Шинопроводы состоят из жесткого ПВХ корпуса и медных токопроводящих жил. Конструкция корпуса шинопровода и токосъемника исключают возможность перепутывания фаз.
— Токосъемники выполнены в виде скользящей, холо…
Презентация завода Uting Telecontrol
Презентация завода Uting Telecontrol
Видео презентация завода радиотехнических изделий Uting Telecontrol.
Один из крупнейших производителей промышленного радиоуправления, пультов для кранов и прочих грузоподъемных механизмов.
https://www.youtube.com/watch?v=hQiPE9z7E6Y…
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.

Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.

Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.

На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
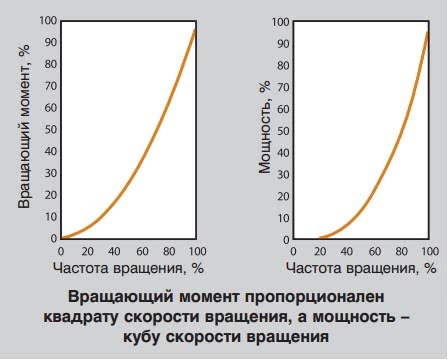
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.

В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.

У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
- 2 полюса – 3000 об/мин
- 4 полюса – 1500 об/мин
- 6 полюса – 2000 об/мин
- 8 полюса – 750 об/мин
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором – электродвигатели обращенного типа.
Конструкции синхронного двигателя с постоянными магнитами: слева – стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов(англ. SPMSM – surface permanent magnet synchronous motor);
- синхронный двигатель со встроенными (инкорпорированными) магнитами(англ. IPMSM – interior permanent magnet synchronous motor).
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.
Статор электродвигателя с распределенной обмоткой
Статор электродвигателя с сосредоточенной обмоткой
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,…., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток – невозможность влияния на форму кривой ЭДС .
Схема трехфазной распределенной обмотки
Схема трехфазной сосредоточенной обмотки
Форма обратной ЭДС электродвигателя может быть:
трапецеидальная;
синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора .
Какие бывают виды регуляторов?
Существует два вида регуляторов, доступных на сегодняшнем рынке:
- на переменном резисторе,
- электронный (шаговый и подвижный).
Все они обладают разными способами управления скоростью вращения и, посему, эффективность (потребление электроэнергии) у каждого вида отличается. С этой точки зрения, классический регулятор – самый дешевый, но неэффективный. Давайте рассмотрим все три типа.
Электронный регулятор
Электронные – это новейшие типы из доступных регуляторов на рынке. Они намного меньше по размерам, чем другие. Для понижения напряжения в них используются вместо резисторов конденсаторы, которые регулируя скорость вращения, управляют сигналом электропитания. В отличие от реостатов не нагреваются и, значит, экономят электроэнергию, когда мотор работает на малых скоростях.
Регуляторы способны сэкономить до 40% на «1» скорости и около 30% на «2-й» скорости по сравнению со своими резисторными аналогами. Существуют электронные разновидности регуляторов:
- подвижные с плавным регулированием.
- шаговые с пронумерованной скоростью действия (обычно от 1 до 5).
Эти устройства обеспечивают низкий уровень искажений движения мотора и, следовательно, меньше нагреваются. Вариант с лучшей технологией и экономией электричества.
Учет вида нагрузки
Для бытовых электроприборов характерны два вида нагрузки:
- Активная;
- Реактивная.
Активная (омическая) нагрузка потребляется приборами, которые преобразуют получаемую энергию в тепло. Это электрическая плита, утюг, фен, калориферы и т.д. Реактивную нагрузку потребляют остальные электроприборы, преобразующие в тепло только незначительную часть энергии. Основная часть потребляемой энергии используется с другой целью. Примерами таких приборов могут быть холодильник, пылесос, телевизор, компьютер и т.д.
Если вам нужна помощь в выборе мощности генератора для вашего дома, производственного цеха или любого другого объекта, обратитесь за квалифицированной консультацией к нашим специалистам.
Источник
Похожие записи:
 Как выставить зажигание с помощью стробоскопа?
Как выставить зажигание с помощью стробоскопа?
 Сигнализация действия защиты и автоматики
Сигнализация действия защиты и автоматики
 Подключение потолочного светильника со светодиодами
Подключение потолочного светильника со светодиодами
 Маркировка smd компонентов: кодовые обозначения
Маркировка smd компонентов: кодовые обозначения
 Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
Как сделать веб-приложение для вашего собственного bluetooth low energy девайса?
 Как подключить усилитель в машине
Как подключить усилитель в машине